
TrafficFluid: Lane-free Artificial-Fluid Environment for Vehicular Traffic
TrafficFluid (2019-2025) is an ERC (European Research Council) Advanced Grant.
Welcome to TrafficFluid
TrafficFluid (2019-2025) is an ERC (European Research Council) Advanced Grant. TrafficFluid is one of the 222 proposals (out of 2,052 proposals submitted) that have been funded all over Europe and in all scientific disciplines, in the frame of the ERC-2018-ADG (ERC Advanced Grants). TrafficFluid is the only project that has been funded in Greece. Τhis is the second time, that ERC funds one of Prof. Papageorgiou projects, the first ERC Advanced Grant being the project TRAMAN21 (2013-2018).
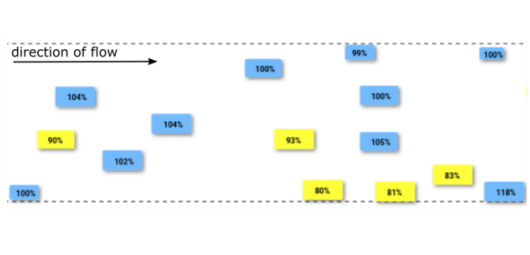
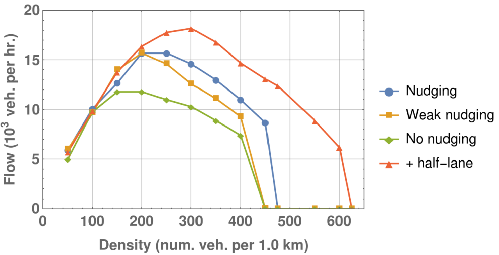
Traffic congestion is a serious threat for the economic and social life of modern societies as well as for the environment, which calls for drastic and radical solutions. The project puts forward an utterly original idea that leads to a novel paradigm for vehicular traffic in the era of connected and automated vehicles (CAVs). TrafficFluid combines lane-free traffic with vehicle nudging to provide, for the first time since the automobile invention, the unprecedented possibility to design (rather than merely describe or model) the traffic flow characteristics in an optimal way, i.e. to engineer the future CAV traffic flow as an efficient artificial fluid. To this end, the project will develop and deliver the necessary vehicle movement strategies for various road infrastructures (motorways and urban roads), along with microscopic and macroscopic simulators and traffic management actions.
TrafficFluid started its contractual activities on 1 December 2019.
Latest News
Acknowledgements
TrafficFluid has received funding from the European Research Council under the European Union's Horizon 2020 Programme / ERC Grant Agreement n. 833915.

The TrafficFluid logo was conceived by Konstantinos Antonopoulos, Anastasios Papageorgiou and Markos Papageorgiou. It was designed by Anastasios Papageorgiou.
Some slideshow pictures have been kindly provided by Attiki Odos.